(30/09/2016 – 31.12.2016)
Studii privind mijloacele de măsură ale mărimilor geometrice şi regimurilor dinamice specifice LC
CUPRINS
| Obiectivele proiectului |
| Obiectivele etapei |
| Rezumatul etapei |
| Descrierea științifică și tehnică a etapei |
| Concluzii |
| Bibliografie |
Obiectivul general al proiectului este interconectarea expertizei existente în Universitatea Politehnica Timişoara cu necesităţile Agentului economic (SC Electrificare SA Bucureşti) şi transferul de cunoştinţe.
Obiectivul specific al proiectului este echiparea unei drezine-pantograf cu un sistem de măsură automată a principalilor parametri ai liniei de contact (LC), dezvoltarea și implementarea unui sistem expert pentru diagnoza automată a LC.
Obiectivele etapei 1, în număr de 5, sunt grupate corespunzător activităților desfășurate conform Planului de realizare a proiectului:
Activitatea 1.1: Stabilirea mărimilor care influenţează calitatea captării energiei
– stabilirea mărimilor geometrice ale LC care trebuie măsurate în vederea asigurării regimului normal de funcţionare a acesteia (obiectiv 1);
– determinarea influenţei mărimilor geometrice ai LC asupra calităţii captării energiei şi a siguranţei în funcţionare a achipamentelor (obiectiv 2);
Activitatea 1.2: Stabilirea metodelor de măsură a mărimilor determinate în etapa precedentă ţinând cont de funcţionarea LC sub tensiunea de 27,5 kV
– stabilirea metodelor de măsură a mărimilor geometrice ale LC (obiectiv 3);
– analiza comportării dinamice a LC în cazul unor defecte şi identificarea acestora pe baza unor curbe carateristice (obiectiv 4);
Activitatea 1.3: Participare la manifestări tehnico-științifice
– prezentarea unei lucrări ştiinţifice la conferinţa IIS 2016 (Innovative Ideas in Science 2016) (obiectiv 5).
Etapa 1 (2016) cuprinde două direcții principale de cercetare:
1 – stabilirea mărimilor care influențează calitatea captării energie și care trebuie măsurate în vederea asigurării unei mentenanțe bazate pe starea reală a LC;
2 – stabilirea metodelor de măsură a mărimilor geometrice și comportamentului dinamic a LC.
Pentru atingerea dezideratelor menționate s-a studiat un vast material bibliografic și s-a ajuns la concluzia că setul minimal de măsurători trebuie să cuprindă zig-zagul, înălțimea firului de contact, forța de contact și parametri auxiliari: identificarea stâlpilor de susţinere, poziţia kilometrică, temperatura, viteza drezinei. Având în vedere că LC funcționează la tensiunea de 27,5kV, se propun metode optice și ultrasonice de măsură, cu prelucrare de imagine în timp real.
O noutate o constituie faptul că se propune determinarea unor defecte (pendule lipsă sau slăbite, defecte de prindere) indirect prin analiza comportamentului dinamic a ansamblului catenară-pantograf. Validitatea metodei a fost demonstrată prin simulare, urmând ca în etapa următoare să fie confirmată experimental.
Diseminarea rezultatelor s-a făcut prin prezentarea unei lucrări științifice la o conferință internațională și afișarea pe site-ul proiectului: .
Pentru Etapa 1 au fost planificate ca rezultate: minim o lucrare științifică prezentată la conferințe tehnico-științifice; 1 raport ştiinţific. S-au realizat: o lucrare științifică prezentată la Conferința internațională INNOVATIVE IDEAS IN SCIENCE 2016, Baia Mare, Romania, 10-11 NOVEMBER 2016 și 1 raport științific.
DESCRIEREA ȘTIINȚIFICĂ ȘI TEHNICĂ A ETAPEI
Activitatea 1.1: Stabilirea mărimilor care influenţează calitatea captării energiei
- Stabilirea mărimilor geometrice ale LC care trebuie măsurate în vederea asigurării regimului normal de funcţionare a acesteia (obiectiv 1)
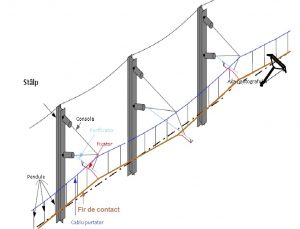
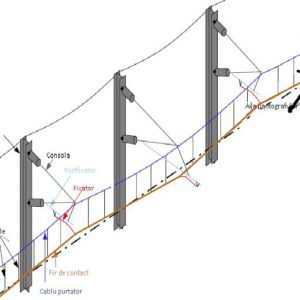
Fig.1 Suspensia catenară |
În cadrul acestei activități, în vederea stabilirii mărimilor geometrice ale LC care trebuie măsurate, am studiat condițiile tehnice de exploatare ale suspensiei catenare (fig.1) precum și normativele românești în vigoare. Pentru corecta funcționare în exploatare, în condiții de maximă siguranță, suspensia catenară trebuie să respecte prevederile impuse prin Instrucția nr.353 pentru întreținerea tehnică și repararea liniilor de contact ale căii ferate electrificate [1]. Am reținut prevederile acestei instrucții ce impun limitele între care trebuie să se încadreze valorile parametrilor geometrici ai LC. Ele sunt: |
“Art. 44. Înălţimea firului de contact (FC), măsurată de la nivelul superior al şinei, va fi:
— normală în linia curentă şi staţii ……………………………………………………………. 5 750 mm;
— minimă ……………………………………………………………………………… 5 150 mm;
— maximă ……………………………………………………………………………….. 6 500 mm;
— minimă la pasaje de nivel, drumuri naţionale ………………………………………………….. 6 000 mm;
— minime la restul pasajelor de nivel …………………………………………………………. 5 500 mm;
— minimă la lucrări de artă existente cu derogare de la STAS 4392—68 ……….. …………………….. 4 990 mm;
Valorile date ca minime vor corespunde temperaturilor maxime din zona respectivă.
Art. 47. Valoarea normală a zigzagului firului de contact în aliniament este de ±200 mm. În curbe, abaterea firului de contact de la axul pantografului spre exteriorul curbei este de 250 mm. Valorile menţionate se consideră în stare statică în punctele de fixare a suspensiei catenare, admiţîndu-se toleranţe pînă la ±20 mm. Se admite o abatere a firului de contact în curbe la mijlocul deschiderii de 150 mm.
Art. 49. Firul de contact trebuie să fie dispus în aliniament cu zigzag, iar în curbe cu abateri, respectîndu-se succesiunea precizată prin proiecte.
Art. 55. Pendulele suspensiei catenare trebuie să asigure o legătură elastică a firului de contact de cablul purtător şi deplasarea liberă longitudinală a firului de contact, sub influenţa variaţiei de temperatură. Firul de contact trebuie să fie îndreptat cu grijă, astfel încât axa pendulei să se dispună conform tabelei de montaj, iar firul de contact să nu prezinte nici cea mai mică încovoiere în plan vertical.
Art. 56. Distanţa între pendule, măsurată pe FC nu trebuie să depăşească 12 m şi să corespundă planului de pendulaj”
În concluzie, rezultă că trebuie să fie măsurate următoarele mărimi geometrice:
– zig-zagul firului de contact;
– înălțimea firului de contact față de ciuperca șinei.
De asemenea, trebuie realizate:
– identificarea lipsei (ruperii) pendulelor, incorecta lor tensionare sau alte defecte de prindere a LC;
– localizarea defectelor prin identificarea stâlpilor de susținere a suspensiei catenare;
– localizarea geografică a fiecărui set de măsurători;
– viteza de deplasare a drezinei;
– temperatura mediului ambiant la care se fac măsurătorile.
Înafară de mărimile geometrice care vor fi măsurate direct, se impune măsurarea continuă a forței de contact pantograf-catenară deoarece unele defecte, mai sus menționate (lipsa pendulelor, defecte de prindere) nu pot fi identificate direct ci doar prin analiza regimului dinamic al suspensiei (metodă nouă propusă în acest proiect).
În prezent, Instrucția nr.353 prevede două tipuri de măsurători:
– măsurători efectuate de către un “vagon de inspecție” [2] (de tip TMC, Plasser UK etc.), unic pe rețea, atât a căii de rulare cât și a suspensiei catenare, ce se efectuează la intervale mari de timp, cu scopul determinării stării tehnice exacte a instalațiilor. Precizia acestor măsurători este ridicată, dar costul unui vagon de inspecție este de ordinul mil. de euro.
Procedura nu poate fi utilizată pentru cunoașterea permanentă a stării tehnice a suspensiei catenare și, deci, nu permite o mentenanță bazată pe aceste măsurători.
– măsurători periodice, la intervale prestabilite și precizate în Instrucția nr.353, care se efectuează manual de către echipe de muncitori. Pe lângă faptul că precizia acestor măsurători este subiectivă, pentru unele este necesară scoaterea de sub tensiune a LC și perturbarea traficului. De asemenea, costul acestor măsurători este ridicat din cauza cheltuielilor de personal.
Nici această procedură nu permite efectuarea unor lucrări de mentenanță plecând de la starea reală a instalațiilor (este posibil ca zona verificată să nu conțină defecte, dar acestea să existe într-o zonă neplanificată și să producă efecte).
Din motivele expuse, în proiectul de față se propune o nouă metodă de mentenanță a LC bazată pe cunoașterea stării reale a acesteia. Această stare se va determina prin măsurători automate ai principalilor parametri ai LC, stabiliți și precizați mai sus, măsurători care se vor realiza la intervale scurte de timp, cu ocazia deplasării zilnice a drezinei-pantograf (existentă la fiecare sector LC) la diverse lucrări.
- Determinarea influenţei mărimilor geometrice ale LC asupra calităţii captării energiei şi a siguranţei în funcţionare a achipamentelor (obiectiv 2)
Pentru realizarea celui de-al doilea obiectiv al activității 1.1 au fost studiate principalele probleme apărute în cursul exploatării căii ferate electrificate datorate nerespectării condițiilor tehnice ale acesteia. Au rezultat o serie de concluzii. Cele referitoare la influența suspensiei catenare asupra siguranței în funcționare sunt:
– Nerespectarea zig-zagului poate conduce la “agățarea” suspensiei catenare, ruperea firului de contact, distrugerea pantografului și a suspensiei pe sute de metri, până când trenul se oprește. Rezultă pagube materiale considerabile, perturbarea traficului feroviar, cheltuieli suplimentare pentru refacerea instalației [3].
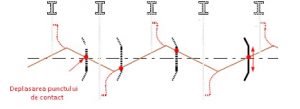 Fig.2 Zigzagul firului de contact
Fig.2 Zigzagul firului de contact
– Nerespectarea înălțimii firului de contact poate conduce la apariția unor descărcări electrice între firul de contact (aflat la 27,5kV) și elemente învecinate (lucrări de artă, vagoane etc.). Aceste descărcări pot produce incendii, electrocutări, secționări ale firului de contact. De asemenea, nerespectarea înălțimii firului de contact poate produce variații ale forței de contact pantograf-catenară, cu efect direct asupra calității captajului de energie și a uzurii elementelor aflate în contact.
– Starea necorespunzătoare a pendulelor produce deplasări verticale suplimentare ale liniei de contact iar, prin modificarea comportării dinamice a suspensiei catenare, va influența calitatea captajului de energie. Același efect îl au și alte defecte de prindere a firului de contact.
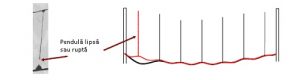 Fig.3 Evidențierea efectului lipsei unei pendula
Fig.3 Evidențierea efectului lipsei unei pendula
Menționăm că un comportament dinamic necorespunzător al ansamblului suspensie catenară-pantograf poate conduce, la viteze mari de circulație a trenurilor, la anularea forței de contact și, deci, la apariția arcurilor electrice și a problemelor create de acestea (pierderi de energie în arc, uzură prematură sau chiar topirea firului de contact, poluare electro-magnetică). Problema este mult tratată în literatura de specialitate ([4], [5], [6], [7]), în special pentru trenurile care circulă la viteze mari, fără a primi o rezolvare radicală până la momentul de față.
 Fig.4 Arc electric fir de contact-pantograf
Fig.4 Arc electric fir de contact-pantograf
(J. Ambrósio, J. Pombo, M. Pereira, P. Antunes and A. Mósca, Recent Developments in Pantograph-Catenary Interaction Modelling and Analysis, International Journal of Railway Technology Vol. 1, Issue 1, Pg 249-278, 2012.)
Considerăm că obiectivele activității 1.1 (obiectivele 1 și 2) au fost realizate integral. Rezultatele obținute constitue baza activităților ulterioare din cadrul proiectului.
Activitatea 1.2: Stabilirea metodelor de măsură a mărimilor determinate în etapa precedentă ţinând cont de funcţionarea LC sub tensiunea de 27,5 kV
- Stabilirea metodelor de măsură a mărimilor geometrice ale LC (obiectiv 3)
În cadrul acestei activități s-au stabilit principiile de bază și tehnologiile care vor fi utilizate pentru măsurarea mărimilor precizate în cadrul activității 1.1. Înainte de definitivarea lor, acestea vor putea fi experimentate, într-o activitate ulterioară, pe un ansamblu de laborator pantograf-linie de contact care simulează comportamentul real al acestuia și, în funcție de rezultatele obținute, vor fi implementate pe drezina pantograf reală.
Problema esențială în cazul măsurării mărimilor geometrice ale LC o constituie faptul că aceste măsurători trebuiesc efectuate de la distanță, fără contact direct cu elementele aflate la tensiunea de 27,5 kV. Rezultă că singurele metode aplicabile sunt cele optice sau ultrasonice.
În esență, zig-zagul și înălțimea firului de contact pot fi determinate prin analiza evoluției în timp și spațiu a punctului de contact pantograf-linie de contact (cercul verde din fig. 5), numit în continuare punct critic. Imaginea acestui punct critic este preluată de o cameră video de înaltă rezoluție iar deplasările verticale și orizontale ale acestuia vor fi determinate prin analiză computerizată de imagine. Conectarea camerei video la calculator se va realiza cu ajutorul unei plăci de achiziții de date.

Fig.5 Evidențierea punctului critic (contact pantograf-linie de contact)
Mișcarea verticală a pantografului (pentru determinarea înălțimii firului de contact) mai poate fi măsurată și cu ajutorul unui senzor de distanță plasat pe cabina drezinei.
Identificarea stâlpilor de susținere se va face tot prin analiză de imagine, citind numărul înscris pe fiecare.
Poziția geografică (kilometrică) se va determina, în timp real, cu ajutorul unui modul GPS.
Pe baza considerațiilor anterioare, am stabilit configurația sistemului propus pentru măsurarea mărimilor geometrice specifice LC, prezentată în figura 6.
Caracteristicile minimale ale elementelor sistemului de măsură și achiziție sunt următoarele:
⇒ …… Camerele video [8] se vor conecta la magistrala USB a plăcii de achiziție și trebuie să aibă următoarele caracteristici tehnice:
– rezoluție minim 1280×720 pixeli
– achiziție cu rata de refresh a imaginii minim 25 cadre/s (FPS)
– sistem pentru focalizare automată a imaginii
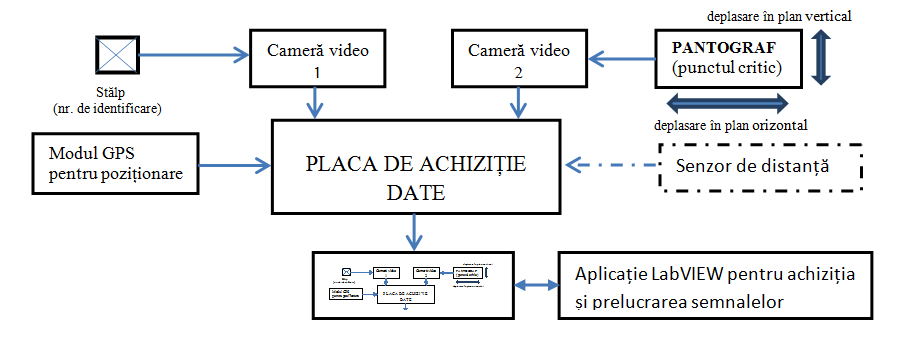
Fig.6 Conectarea sistemului propus pentru măsurarea mărimilor geometrice specifice liniei de contact
⇒ …… Modulul GPS [9]
În vederea monitorizării poziției geografice se propune utilizarea unui modul GPS de tip Pmod Digilent. El utilizează un conector cu 6 pini, iar comunicația se realizează prin magistrala UART. Interfața funcționează la o rată de transfer de 9,6kBd, 8 biți de date, fără paritate și un bit de stop. Modulul GPS are antena integrată, iar rata de update este, conform datelor sale tehnice, 10Hz.
Poziția kilometrică a drezinei (și deci a punctelor de măsură) se va determina software pe baza latitudinii și longitudinii furnizate de modulul GPS.
⇒ …… Senzorul de distanță [10]
| O altă variantă de măsurare a deplasării verticale a pantografului este utilizarea senzorului de distanță LV-MaxSonar MB1040 conectat la placa de achiziții de date. La fel ca și modulul GPS, senzorul de distanță comunică cu placa de achiziții prin magistrala UART. Distanța maximă până la care LV-MaxSonar MB1040 este sensibil atinge 6,5m. Alimentarea senzorului se poate face direct din placa de achiziție de date (5V). | 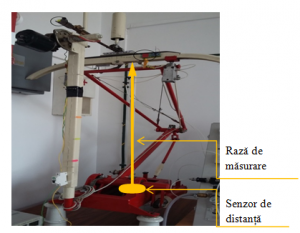
Fig.10 Măsurarea deplasării verticale a pantografului (instalația de laborator) |
⇒ …… Placa de achiziție de date [11] este de preferat a fi NI MyRIO-1900. Caracteristicile tehnice ale acesteia sunt prezentate în continuare:
-8 canale analogice de intrare cu referință la masă 0-5V (500kS/s)
-2 canale analogice de intrare diferențiale ±10V (500kS/s)
-2 canale analogice de ieșire cu referință la masă 0-5V (345kS/s)
-2 canale analogice de ieșire diferențiale ±10V (345kS/s)
-24 canale digitale reconfigurabile intrare/ieșire compatibile TTL
-posibilitate achiziție pe magistrale USB, UART, SPI, I2C
-procesor cu tehnologie FPGA
⇒ ……Tehnologii software propuse a fi utilizate la măsurarea mărimilor geometrice specifice LC
Platforma de bază este asigurată de LabVIEW Development System ([12], [13]). Sintaxa programelor este grafică, fapt ce determină o mai bună vizualizare a codurilor sursă. În vederea prelucrării imaginilor se va folosi modulul specializat Vision Development. Pentru achiziția și prelucrarea imaginilor în timp real mai sunt necesare modulele: Vision Acquisition Software și Vision Development Module Run-Time.
Se propune utilizarea tehnologiei Recunoașterea modelului de culoare (Color pattern matching) care presupune utilizarea unui algoritm ce verifică la fiecare iterație prezența unui model de culoare ales într-o regiune de interes. Pentru a determina zig-zagul și înălțimea firului de contact, se va urmări mișcarea orizontală și verticală a punctului critic.
O altă variantă pentru măsurarea deplasărilor în plan vertical și orizontal cu prelucrare optică este folosirea tehnologiilor Machine Vision utilizată în aplicații ce implică măsurători fizice, inspecții vizuale în vederea detectării defectelor, citirea codurilor de bare sau a etichetelor – în cazul de față, identificarea numărului stâlpilor de susținere a suspensiei catenare. În plus, tehnologiile Machine Vision au soluții pentru detecția mișcării [13].
În concluzie, utilizând pachetele software menționate, va exista posibilitatea de a calcula în timp real distanțele între anumite puncte de interes și vitezele elementelor în mișcare.
- Analiza comportării dinamice a LC în cazul unor defecte şi identificarea acestora pe baza unor curbe carateristice (obiectiv 4)
Suspensia catenară reprezintă un sistem mecanic cu alcătuire cvasiperiodică, constituit în principal din cabluri pretensionate. Această structură, fiind foarte suplă, permite propagarea undelor de amplitudini mari, care se reflectă şi se suprapun, dând naştere unor deplasări complexe. Totodată, prin concepţie, catenara conţine elemente care induc o comportare neliniară, fapt ce accentuează dificultăţile de analiză a comportării sub acţiunea forţelor la care este supusă. Pantograful, mecanism cu structura alcătuită din bare articulate, prezintă propriile sale caracteristici dinamice şi are, de asemenea, o comportare neliniară. Cuplajul dinamic între aceste două substructuri cu caracteristici mecanice independente, mobile una în raport cu cealaltă, aflate în conexiune prin intermediul unui contact alunecător unilateral, concentrează astfel un număr semnificativ de parametri necesar a fi analizaţi. De asemenea, viteza de deplasare a pantografului este limitată superior la valori ce depind în principal de caracteristicile structurale ale catenarei, inclusiv de reglajele tehnice necesare asigurării tensiunii mecanice în sistem, iar catenara este considerată actualmente ca principal factor limitativ în circulaţia trenurilor de mare viteză.
Problema modelării matematice a ansamblului suspensie catenară-pantograf este foarte complexă și a fost abordată de mulți autori [14÷24]. Datorită faptului că rigiditatea suspensiei catenare este o mărime de stare variabilă, dependentă de poziţia secţiunii de referinţă, fiind mult mai mică în regiunile situate spre mijlocul deschiderii, comparativ cu zonele din dreptul stâlpilor de susţinere, unde catenara este semnificativ mai rigidă, rezultă că răspunsul dinamic al suspensiei va avea ca efect:
– modificarea caracteristicilor de deplasare ale fronturilor de undă progresive şi regresive, generate de acţiunea perturbatoare a pantografului;
– mişcări verticale suplimentare, rapide şi relativ frecvente, ascendente şi descendente ale pantografului, pentru a putea urmări deplasările rapide şi variabile ale firului de contact. Variaţia rigidităţii catenarei precum şi periodicitatea cvasialeatoare a acestei mărimi, sunt parametri recunoscuţi ca factori determinanţi ai calităţii captajului şi, de aceea, prin măsuri adecvate de proiectare şi de mentenanţă, se urmăreşte regularizarea rigidităţii suspensiei şi diminuarea efectului prezenţei stâlpilor de susţinere.
Sub aspectul celor prezentate şi în urma analizei factorilor care determină cvasiperiodicităţile geometrice şi mecanice în sistemul catenar, aceştia se pot clasifica după diverse criterii. O clasificare de interes în accepţiunea problematicii prezentului proiect, este cea propusă în [18], care indică următoarele două categorii: singularităţi şi, respectiv, defecte.
- Singularităţile – reprezintă zone ale catenarei care nu corespund situaţiei de captaj nominal, din cauza unei modificări a geometriei şi/sau a elasticităţii catenarei.
Dintre acestea, se menţionează:
– Podurile rutiere, care permit circulaţia autovehiculelor la un nivel situat deasupra liniei de contact.
Schimbările induse catenarei includ modificări ale geometriei suspensiei şi ale caracteristicilor cablului purtător;
– Echipamentul de tensionare mecanică a suspensiei, a cărui prezenţă impune atât modificări importante ale geometriei structurii catenare, cât şi existenţa unei zone în care pantograful trebuie să treacă de pe un fir de contact pe altul şi, pentru o anumită perioadă de timp, se află în contact simultan cu două ori mai multe fire;
– Macazurile aeriene.
- Defectele – sunt rezultatul uzurii cauzată de factori de exploatare, cele mai curent întâlnite fiind următoarele:
– Pendule rupte ori detensionate, care determină modificarea geometriei firului de contact. În situaţia unei pendule lipsă, modificarea geometriei catenarei este evidenţiată prin afectarea formei deformatei statice a suspensiei şi, totodată a caracteristicilor sale inerţiale. Aceste defecte, relativ frecvent întâlnite, deşi sunt considerate ca fiind „de geometrie”, ele sunt reprezentative ca generatoare de „puncte dure” în sistemul catenar;
– Exfolieri ori depuneri pe firul de contact, prezenţa unor elemente de joncţiune montate temporar pentru refacerea conexiunii între două fire de contact ori cu ocazia operaţiilor curente de mentenanţă;
– Ruperea ori blocarea unui braţ de susţinere sau a altor subansamble ori elemente, evenimente ce au implicaţii evidente atât asupra caracteristicilor fizico-mecanice cât şi a mărimilor de stare a sistemului.
Cele două categorii de factori care determină variaţia rigidităţii suspensiei catenare au consecinţe diferite în strategia de mentenanţă a sistemului.
În concluzie, analiza fenomenelor care influenţează comportarea dinamică a ansamblului suspensie catenară–mecanism pantograf, în situaţia actuală a transportului electric feroviar, implică abordarea unor probleme complexe din domeniul mecanicii structurilor elastice cu comportament neliniar, în conexiune cu probleme de acelaşi nivel de complexitate din domeniul ingineriei electrice şi informaticii industriale.
Pentru simularea comportamentului dinamic al ansamblului suspensie catenară-pantograf s-a folosit pachetul OSCAR-SAM 5 [25]. În acest scop o serie de defecte au fost „instalate” intenționat, pentru determinarea unor „semnături” în nivelul și alura semnalului obținut.
O curbă a forței de contact pentru un defect de tip pendulă, realizată prin simulare, este prezentată în figura 12.
Astfel, pendula ruptă, situată la abscisa 850m și pendulele slăbite situate la abscisele 958m și 1065m produc modificări importante de semnal (creșteri ale forței de contact).
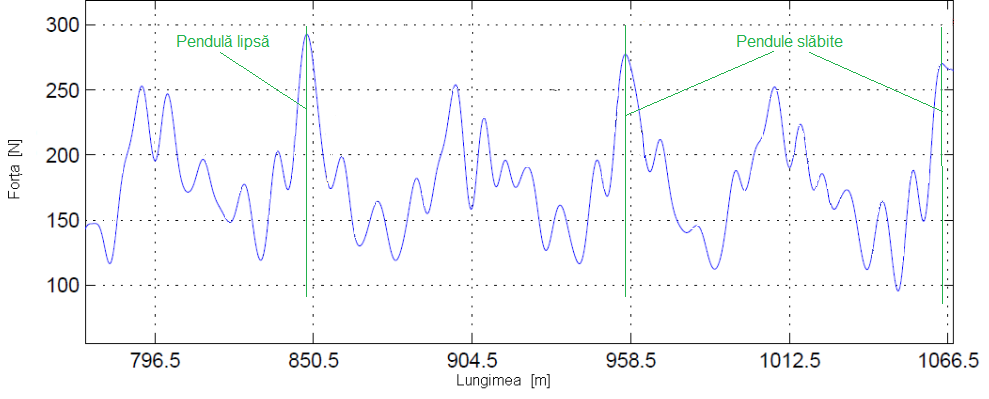
Fig. 12 Forța de contact – modelare OSCAR
Considerăm că obiectivele activității 1.2 (obiectivele 3 și 4) au fost realizate integral. Rezultatele obținute constitue baza activităților ulterioare din cadrul proiectului. Aceste rezultate teoretice vor fi verificate experimental pe un stand de laborator și apoi în condiții reale de lucru. În caz de necesitate se vor aduce corecțiile necesare.
Activitatea 1.3: Participare la manifestări tehnico-științifice
- Prezentarea unei lucrări ştiinţifice la conferinţa IIS 2016 (Innovative Ideas in Science 2016) (obiectiv 5)
A fost elaborată o lucrare științifică cu titlul:
Influence of Typical Faults over the Dynamic behavior of Pantograph-Catenary Contact Force in Electric Rail Transport
Autori: S. Rusu-Anghel1), A. Ene2)
1) Department of Electrical Engineering and Industrial Informatics, Politehnica University of Timisoara, Romania
2) SC Electrificare CFR SA, Bucharest, Romania
Summary: The quality of electric energy capture and also the equipment operational safety depend essentially of the technical state of the contact line (CL). The present method for determining the technical state of CL based on advance programming is no longer efficient, due to the faults which can occur into the not programmed areas. Therefore, they cannot be remediated. It is expected another management method for the repairing and maintenance of CL based on its real state which must be very well known.
In this paper a new method for determining the faults in CL is described. It is based on the analysis of the variation of pantograph-CL contact force in dynamical regime. Using mathematical modelling and also experimental tests, it was established that each type of fault is able to generate ‘signatures’ into the contact force diagram. The identification of these signatures can be accomplished by an informatics system which will provide the fault location, its type and also in the future, the probable evolution of the CL technical state.
The measuring of the contact force is realized in optical manner using a railway inspection trolley which has appropriate equipment. The analysis of the desired parameters can be accomplished in real time by a data acquisition system, based on dedicated software.
Keywords: pantograph-catenary contact force, faults in contact line, railway inspection trolley.
This work was supported by a grant of the Romanian National Authority for Scientific Research and Inovation, CNCS/CCCDI-UEFISCDI, project number 59BG/2016 within PNCDI III
Această lucrare a fost prezentată la Conferința internațională INNOVATIVE IDEAS IN SCIENCE 2016, Baia Mare, Romania, 10-11 NOVEMBER 2016 și va fi publicată în IOP Conference Series – Materials Science and Engineering, indexed by Thomson Reuters – Web of Sciences (Conference Proceedings Citation Index) and Scopus.
Considerăm că și acest obiectiv a fost realizat.
Mărimile geometrice ale LC care influențează esențial calitatea captării energiei și siguranța în funcționare și, deci, care trebuie măsurate în vederea asigurării regimului normal de funcționare a acesteia sunt: zig-zagul și înălțimea firului de contact. Înafară de acestea, trebuie realizate: măsurarea forței de contact (pentru identificarea lipsei sau slăbirii pendulelor – cu influență directă asupra comportamentului dinamic al suspensiei catenare); localizarea defectelor prin identificarea stâlpilor de susținere a suspensiei catenare; localizarea geografică a fiecărui set de măsurători; viteza de deplasare a drezinei; temperatura mediului ambiant la care se fac măsurătorile. Nerespectarea condițiilor impuse mărimilor geometrice poate conduce la deranjamente și pierderi materiale.
Pentru măsurarea mărimilor specificate în paragraful anterior se pot folosi doar metode optice sau ultrasonice având în vedere că LC este la tensiunea de 27,5kV. Identificarea lipsei sau slăbirii pendulelor (și alte defecte de prindere) se poate face prin prelucrarea curbei forței de contact (măsurată tot pe cale optică) și determinarea semnăturilor specifice.
Diseminarea rezultatelor s-a făcut prin prezentarea unei lucrări științifice la o conferință internațională și afișarea pe site-ul proiectului: .
Toate obiectivele etapei 1 au fost realizate.
BIBLIOGRAFIE
[1] MTT-DCF, Instrucția pentru întreținerea tehnică și repararea instalațiilor liniilor de contact ale căii ferate electrificate, Nr.353, Centrul de documentare și publicații tehnice, 1972
[2] Ordinul nr. 2256/2006 privind aprobarea Instrucțiunilor pentru diagnoza căii și liniei de contact efectuată cu automotorul TMC
[3] D. Demian, Ahmed Rachid, I. Gîrniță, C.I. Alic, Stela Rusu-Anghel, C.C. Miklos, Șt. Roșeanu, Contributions to the Development and Improvement of Maintenance Management of Catenary Networks for Railway, PACIFIC 2011 – International Conference on: Pantograph-Catenary Interaction Framework for Intelligent Control, Conference Proceedings, Amiens, France, ISBN 0-7277-3252-8, 2011
[4] J. Ambrósio, J. Pombo, M. Pereira, P. Antunes and A. Mósca, Recent Developments in Pantograph-Catenary Interaction Modelling and Analysis, International Journal of Railway Technology Volume 1, Issue 1, Pages 249-278, 2012
[5] Zhang W., Mei G., Wu X., et Shen Z., Hybrid simulation of dynamics for the pantograph-catenary system. Vehicle System Dynamics, 38: 393-414, 2002.
Zhou Ning, Zhang Weihua, Investigation on dynamic performance and parameter optimization design of pantograph and catenary system, Finite elements in analysis and design 47 (2011) 288-295
[7] Daniel Ritzberger, Emir Talic, Alexander Schirrer, Efficient simulation of railway pantograph/ catenary interaction using pantograph-fixed coordinates, IFAC-PapersOnLine 48-1 (2015) 061–066
[8] Camera video USB Logitech http://ro.farnell.com/logitech/960-000582/webcam-3mp-c270-logitech/dp/1848121
[9] GPS Digilent Pmod https://reference.digilentinc.com/_media/pmod:pmod:pmodgps_rm.pdf
[10] Senzor de distanta POLOLU MAXBOTIX LV-MAXSONAR-EZ4 SONAR MB1040 http://www.maxbotix.com/documents/LV-MaxSonar-EZ_Datasheet.pdf
[11] Placa de achizitie de date NI My-RIO 1900 http://www.ni.com/pdf/manuals/376047a.pdf
[12] Thomas Klinger, Image processing with LabVIEW and IMAQ Vision, Prentice Hall, ISBN 0-13-047415-0, 2003
[13] Rubén Posada-Gómez, Oscar Osvaldo Sandoval-González, Albino Martínez Sibaja, s.a., Digital Image Processing Using LabView, Practical Applications and Solutions Using LabVIEW™ Software, InTech, ISBN 978-953-307-650-8, pag.297-316
[14] Alic Carmen, Alic (Miklos) Cristina, Miklos Zsolt I., Upon the Actual Tendencies in Modeling and Simulating the Behavior of the Pantograph-Catenary Pairing Machine Design 2009, Anniversary Vol. of the Faculty of Technical Sciences Novi Sad, COPERNICUS – Journal Master List ISSN 1821-1259
[15] Bennet J. et all, A Mathematical Model of the Pantograph – Catenary Dynamic Interaction with several Contact Wires, International Journal of Applies Mathematics, 2007
[16] Bianchi, J. P., Validation du logiciel OSCAR. Rapport de fin d’études, École Centrale de Lyon, 2005
[17] Collina, A. et Bruni, S., Numerical simulation of pantograph-overhead equipment interaction. Vehicle System Dynamics, 38: 261-291, 2002
[18] Lopez-Garcia O., Carnicero A., Marono J. L., Influence of Stiffness and contact modelling on catenary – pantograph system dynamics, in Journal of Sound and Vibration pp. 806-821, 299 (2007)
[19] Massat, Jean-Pierre, Modélisation du comportement dynamique du couple pantographe-caténaire. These doctorat, L’École Centrale de Lyon, France, 2007
[20] Mitsuo A., Precise Measurement and Estimation Method for Overhead Contact Line Unevennes, Electrical Engineering in Japan, Vol.160, nr.2, pp. 77-85, 2007
[21] Rusu, N., Averseng J., Miklos C., Alic, C., Anghel (Rusu-Anghel) S., Dynamic modeling of pantograph – catenary system for energy loss control, IEEE – TTTC, International Conference AQTR 2006, Cluj-Napoca, ISBN (10) 973-713-114-2, ISBN (13) 978-973-713-114-0
[22] Rusu-Anghel S., Gârniţă I., Gavrilă I., Pănoiu C., Pănoiu M., Mezinescu S., Advanced System for the Control of Work Regime of Railway Electric drive Equipment, 6th WSEAS International Conference on Energy, Environment, Ecosystems and Sustainable Development (EEESD 10), pp.115-121, ISSN/ISBN 1792/5924/978-960-474-237-0,Timişoara, Romania, 2010
[23] Rusu-Anghel S., Miklos C., Averseng J., Mezinescu S., Control System for Catenary – Pantograph Dynamic Interaction Force, Proceedings of 2010 International Joint Conference on Computational Cybernetics and Technical Informatics (ICCC – CONTI), pp.181-186, Timişoara, Romania, 2010
[24] SNCF, Installations de traction électrique: outils pédagogiques. Rapport technique, SNCF, 1999
[25] OSCAR SAM 5.0 – User guide