(01/01/2018 – 30.09.2018)
Testarea în condiţii industriale a sistemului inteligent pentru diagnoza automată a liniei de contact din transportul electric feroviar şi transferul către agentul economic a documentaţiei şi rezultatelor
CUPRINS
| Obiectivele proiectului |
| Obiectivele etapei |
| Rezumatul etapei |
| Descrierea științifică și tehnică a etapei |
| Concluzii |
| Bibliografie |
OBIECTIVELE PROIECTULUI
Obiectivul general al proiectului este interconectarea expertizei existente în Universitatea Politehnica Timişoara cu necesităţile Agentului economic (SC Electrificare SA Bucureşti) şi transferul de cunoştinţe.
Obiectivul specific al proiectului este echiparea unei drezine-pantograf cu un sistem de măsură automată a principalilor parametri ai liniei de contact (LC), dezvoltarea și implementarea unui sistem expert pentru diagnoza automată a LC.
OBIECTIVELE ETAPEI
Obiectivele etapei 3, în număr de 7, sunt grupate corespunzător activităților desfășurate conform Planului de realizare a proiectului:
Activitatea 3.1: Montarea pe drezina VMT 863C Geismar a echipamentelor de măsură şi achiziţie a datelor (partea a 2-a);
– supravegherea și îndrumarea lucrărilor de montaj efectuate de către partener;
– efectuarea lucrărilor care revin coordonatorului;
Activitatea 3.2: Testare în condiţii industriale a sistemului de măsură și achiziție;
– testarea funcționalității și preciziei subsistemelor de măsură a zig-zag-ului, înălțimii firului de contact, forței de contact şi a subsistemului de determinare a poziției geografice a drezinei;
– întocmirea unui raport de testare a sistemului de măsură și achiziție date;
– efectuarea a mai multor seturi de măsurători pe același traseu real și stocarea lor pe un sistem de calcul;
Activitatea 3.3: Testarea sistemului expert după implementarea lui pe un sistem de calcul, folosind date reale;
– implementarea software pe un sistem de calcul dedicat a sistemului expert proiectat și actualizarea bazei de date cu valorile măsurătorilor reale înregistrate în cadrul activității 3.2;
– analiza funcţionării sistemului expert cu date reale;
– dacă este cazul, efectuarea corecțiilor necesare;
– întocmirea unui raport de testare a sistemului expert folosind date reale;
Activitatea 3.4: Analiza veridicității deciziilor sistemului expert prin verificare pe teren a acestora;
– compararea răspunsului dat de sistemul expert cu situația reală din teren;
– dacă este cazul, efectuarea corecțiilor necesare;
– întocmirea unui raport privind veridicitatea deciziilor sistemului expert;
Activitatea 3.5: Stagii de practică de cercetare masteranzi și doctoranzi;
– stabilirea responsabililor de practică, din partea coordonatorului și a partenerului;
– întocmirea tematicii practicii doctorandului;
– încheierea convenției-cadru de efectuare a stagiului de practică, între coordonator și partener;
– îndrumarea efectivă a practicii;
– testarea cunoștințelor dobândite de doctorand;
Activitatea 3.6: Transferul către agentul economic a documentaţiei şi rezultatelor finale;
– întocmirea documentației sistemului inteligent pentru diagnoza automată a LC din transportul electric feroviar care va conține: documentația tehnică, seturile de măsurători realizate și rezultatul prelucrării măsurătorilor;
– predarea, pe bază de proces verbal, a sistemului inteligent proiectat și realizat; ;
Activitatea 3.7: Participare la manifestări tehnico-științifice;
– elaborare comunicări ştiinţifice;
– prezentarea a minim o lucrare științifică la o conferință tehnico-științifică sau publicarea în reviste de specialitate.
REZUMATUL ETAPEI
Etapa 3 (2018) conține următoarele direcții principale de cercetare:
– testarea în condiţii industriale a sistemului de măsură a zig-zag-ului și înălțimii firului de contact şi a subsistemului de determinare a poziției geografice a drezinei;
– analiza funcţionării sistemului expert cu date reale;
– transferul către agentul economic a documentaţiei şi rezultatelor finale.
Diseminarea rezultatelor s-a făcut prin prezentarea a 3 lucrări științifice la 2 conferințe internaționale și afișarea pe site-ul proiectului: .
Pentru Etapa 3 au fost planificate ca rezultate: 1 sistem industrial de măsură și achiziție date montat pe drezină (final); raport de testare a sistemului de măsură și achiziție date; set de măsurători pe traseul real al drezinei; sistem expert implementat pe un sistem de calcul dedicat; raport de testare a sistemului expert folosind date reale; raport privind veridicitatea deciziilor sistemului expert; documentația completă a sistemului inteligent de diagnoză automată a LC; proces verbal de predare către beneficiar a documentației; minim o lucrare științifică prezentată la conferințe tehnico-științifice.
S-au realizat: 1 sistem industrial de măsură și achiziție date montat pe drezină (final); raport de testare a sistemului de măsură și achiziție date; set de măsurători pe traseul real al drezinei; sistem expert implementat pe un sistem de calcul dedicat; raport de testare a sistemului expert folosind date reale; raport privind veridicitatea deciziilor sistemului expert; documentația completă a sistemului inteligent de diagnoză automată a LC; proces verbal de predare către beneficiar a documentației; 3 lucrări științifice prezentate la conferințe tehnico-științifice.
DESCRIEREA ȘTIINȚIFICĂ ȘI TEHNICĂ A ETAPEI
Activitatea 3.1: Montarea pe drezina VMT 863C Geismar a echipamentelor de măsură şi achiziţie a datelor (partea a 2-a);
În cadrul acestei activități au fost montate pe drezina VMT 863C Geismar din dotarea sectorului LC Ilia toate echipamentele sistemului de măsură și achiziție date. Lucrările de montaj au fost efectuate de către partener sub supravegherea Coordonatorului iar conectarea echipamentelor și instalarea pe sistemul de calcul a software-ului proiectat au fost făcute de membrii echipei de cercetare ai Coordonatorului.
Sistemul de măsură și achiziție a datelor este compus din următoarele echipamente hardware: – Laptop pentru controlul achiziției datelor;
- Placă de achiziție de date NI MyRIO-1900 utilizată pentru conectarea senzorilor:
- Senzor de temperatură și umiditate HUM-C;
- Senzor de distanță Wenglor OPT2011 pentru măsurarea deplasării pe verticală a pantografului;
- Cameră USB Logitech utilizată pentru determinarea zig-zag-ului;
- Receptor GPS pentru stabilirea poziției geografice a sistemului de măsură
și software-ul pentru achiziția și prelucrarea primară a datelor măsurate, proiectat și realizat de Coordonator, instalat pe notebook.
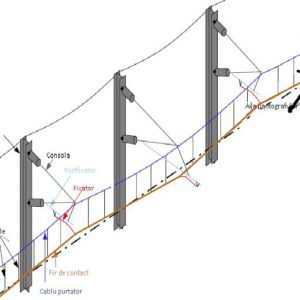
Schema de conectare a elementelor sistemului este prezentată în fig.1., iar în fig.2. și fig.3. sunt prezentate amplasările echipamentelor în exteriorul drezinei respectiv în interior.
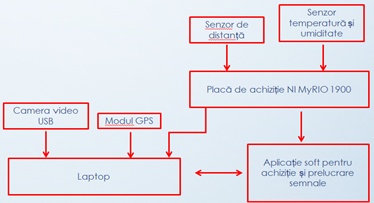
Fig.1 Schema bloc de conectare a echipamentelor.
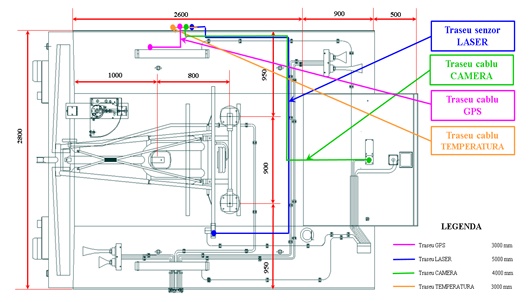
Fig.2 Amplasarea echipamentelor în exteriorul drezinei.
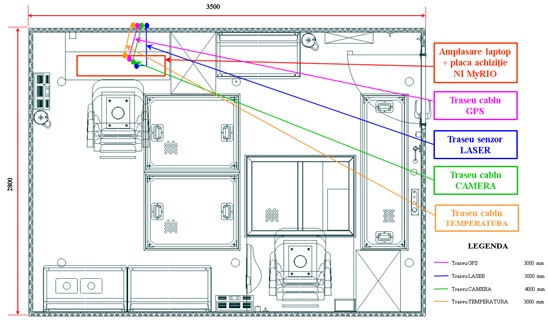
Fig.3 Amplasarea echipamentelor în interiorul drezinei.
În figura 4 se prezintă echipamentele sistemului de măsură și achiziție date montate pe drezină.

Fig.4 Echipamentele sistemului de măsură și achiziție date montate pe drezină
Rezultatul activității îl reprezintă sistemul industrial de măsură și achiziție date montat pe drezină.
Considerăm că obiectivele activității au fost realizate integral.
Activitatea 3.2: Testare în condiţii industriale a sistemului de măsură și achiziție
În cadrul acestei activități s-a efectuat testarea funcționalității și preciziei subsistemelor de măsură a zig-zag-ului, înălțimii firului de contact, forței de contact şi a subsistemului de determinare a poziției geografice a drezinei în condiții industriale, parcurgându-se traseul Ilia Gurasada. S-au măsurat și înregistrat mărimile fizice prevăzute în proiect pentru determinarea stării tehnice a liniei de contact. Rezultatele obținute confirmă corectitudinea schemei de măsură și a metodelor aplicate.
S-a întocmit raportul de testare a sistemului de măsură și achiziție date.
Figurile 5 – 10 prezintă câteva variații ale parametrilor măsurați: latitudine, longitudine, viteză, temperatură, umiditate, înălțime, zig-zag.
Au fost efectuate mai multe seturi de măsurători pe același traseu real care, apoi, au fost stocate pe un sistem de calcul.
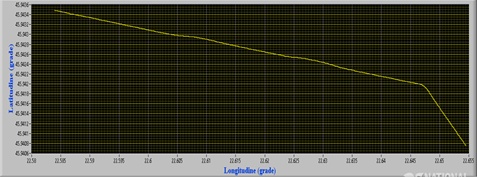
Fig. 5. Variația latitudinii în funcție de longitudine.
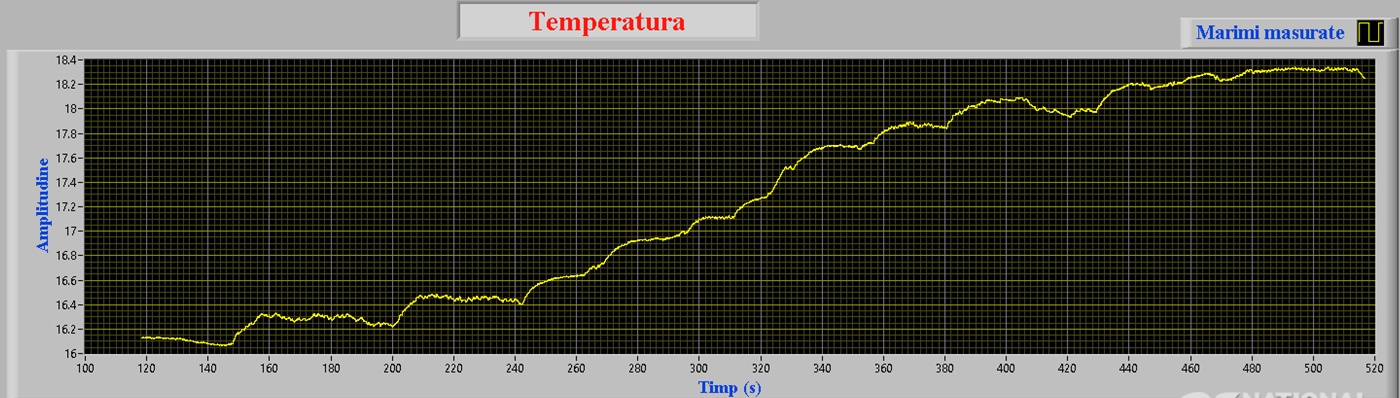
Fig. 6. Variația temperaturii [0C]

Fig. 7. Variația umidității relative [%]
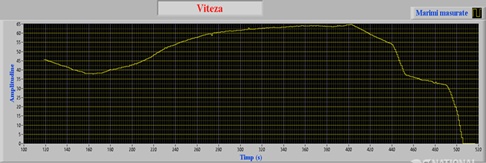
Fig. 8. Variația vitezei [Km/h]
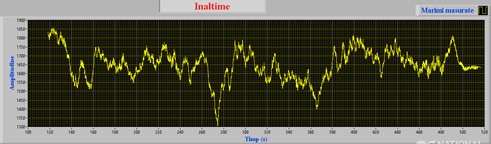
Fig. 9. Variația distanței traductor-placa de măsură de pe pantograf [mm]

Fig. 10. Variația zig-zag-ului.
Menționăm faptul că măsurătorile au fost afectate de starea necorespunzătoare a infrastructurii care a produs vibrații ale drezinei.
Obiectivele activității au fost realizate integral.
Activitatea 3.3: Testarea sistemului expert după implementarea lui pe un sistem de calcul, folosind date reale
Sistemul expert are rolul de a prelua datele stocate din seturile de măsurători efectuate și de a le reprezenta grafic în vederea analizei. De asemenea, variațiile parametrilor urmăriți sunt comparate cu valori limită impuse prin normativele în vigoare, în așa fel încât este semnalată orice abatere.
În cadrul prezentei activități, sistemul expert proiectat în etapa precedentă (2017) a fost implementat software pe un sistem de calcul dedicat. De asemenea, s-a format și actualizat baza de date cu valorile măsurătorilor reale înregistrate în cadrul activității 3.2.
Meniul aplicației sistemului expert de prelucrare și vizualizare a parametrilor, ilustrat în fig.11, prezintă următoarele facilități:
 Fig.11 Fereastra principală a Sistemului expert
Fig.11 Fereastra principală a Sistemului expert
Parametrii înregistrați anterior cu aplicația de achiziție instalată pe laptop-ul din drezină se regăsesc în directoare specifice al căror denumire permite identificarea datei și orei achiziției. Selecția directorului care urmează a fi prelucrat și analizat se face utilizând aplicația de prelucrare a datelor, selectând numele directorului de la submeniul Data achiziției.
Procesarea datelor presupune determinarea inițială a zig-zag-ului pe baza imaginilor filmate pe parcursul achiziției datelor utilizând programul de determinare a zigzag-ului, prezentat în fig. 12.
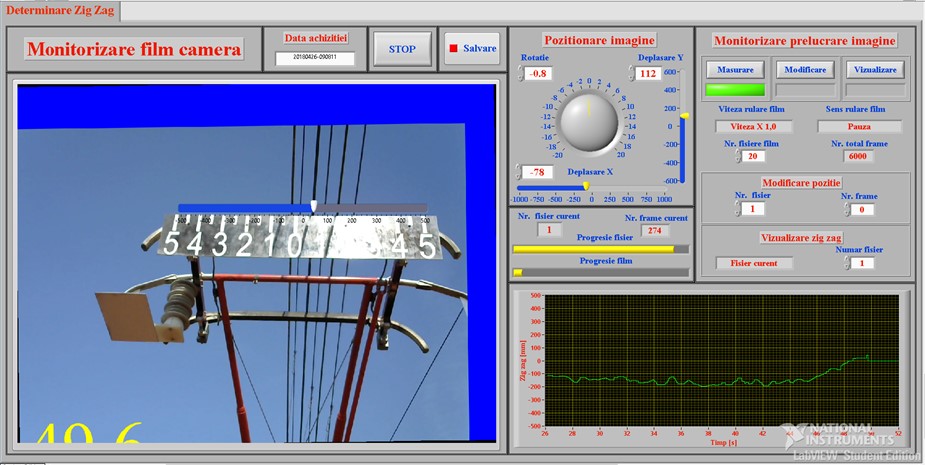
Fig.12 Programul de determinare a zig-zag-ului
După salvarea valorilor zig-zag-ului se începe procesul de prelucrare a datelor, în urma căruia rezultă un fișier care conține toate mărimile măsurate: latitudine, longitudine, viteza drezinei, înălțimea pantografului, temperatura, umiditatea relativă a aerului, zig-zag-ul și distanța în km la care s-a făcut măsurătoarea. Utilizând sistemul de filtrare, se elimină momentele în care nu s-a făcut achiziția parametrilor. Vizualizarea datelor rezultate se poate face utilizând aplicația de vizualizare.
De asemenea, selecția domeniului de vizualizare se poate face utilizând butoanele Fereastră date și Trigger ca în fig. 13.
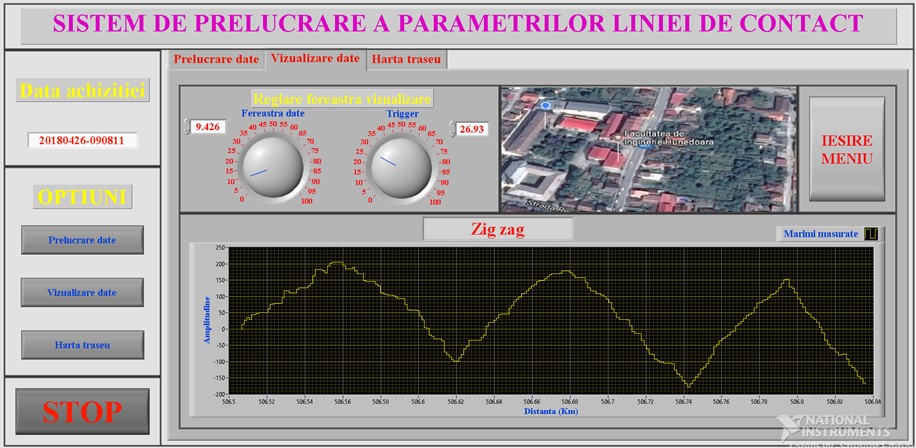
Fig.13 Exemplificarea modificării scarei de reprezentare grafică
Pe baza parametrilor prelucrați, sistemul permite reprezentarea hărții traseului pe care s-a făcut măsurarea parametrilor.
Determinarea încadrării înălțimii și zig-zag-ului în limitele impuse de normativele în vigoare se face utilizând aplicația Sistem expert accesibilă de la butonul Reports
În fig.14 și fig.15 se prezintă variațiile înălțimii și zig-zag-ului, alături de valorile impuse, corespunzătoare unei măsurători pe traseul Ilia-Gurasada.
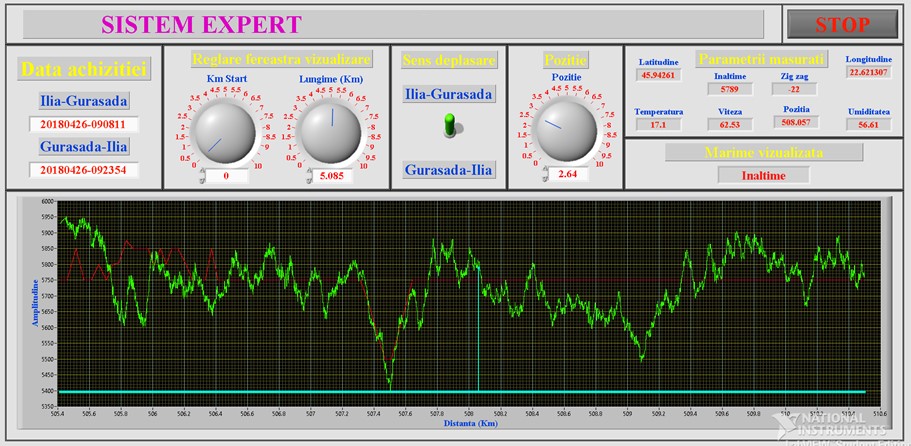
Fig.14 Variația înălțimii LC
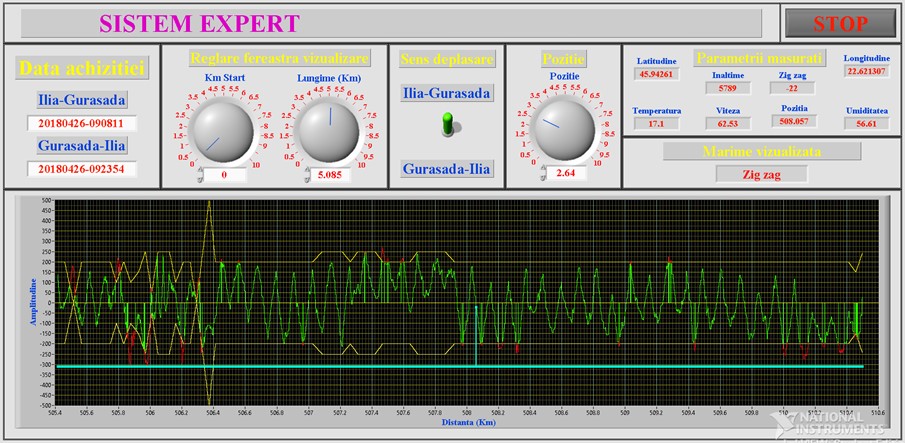
Fig.15 Reprezentarea zigzag-ului
Analiza funcţionării sistemului expert cu date reale și efectuarea corecțiilor necesare s-au finalizat prin întocmirea unui raport de testare a sistemului expert (folosind date reale măsurate).
Activitatea 3.4: Analiza veridicității deciziilor sistemului expert prin verificare pe teren a acestora
În vederea analizei veridicității deciziilor sistemului expert, răspunsul acestuia a fost comparat cu situația reală din teren. S-a constat că sistem expert funcționează corect.
S-a întocmit raportul privind veridicitatea deciziilor sistemului expert.
Considerăm că obiectivele activității au fost realizate integral.
Activitatea 3.5: Stagii de practică de cercetare masteranzi și doctoranzi.
Pentru efectuarea stagiului de practică de cercetare a unui doctorand au fost numiți responsabili: din partea coordonatorului: conf.dr.ing. Deaconu Sorin Ioan și din partea partenerului: ing. Egri Adrian.
Cadrul didactic supervizor al activităţii de practică din partea coordonatorului a organizat în perioada ianuarie 2018-februarie 2018 o selecţie în rândul doctoranzilor Facultăţii de Inginerie Hunedoara, pentru ocuparea locului de practică disponibil. În urma selecţiei a fost ales doctorandul Lihaciu Ciprian, având coordonator de doctorat pe prof.dr.ing. Pănoiu Manuela. S-au întocmit documentele pentru efectuarea practicii (Convenţia cadru pentru efectuarea stagiului de practică, Acordul cadru de colaborare şi Protocolul de colaborare pentru efectuarea stagiului de practică).
Doctorandul a participat la instructajul SSM și SU şi pentru studierea documentaţiei tehnice la sediul din Deva al partenerului de proiect şi s-a deplasat împreună cu echipa de proiect, s-au însoţit de cadrul didactic supervizor şi îndrumătorul de practică, ing. Egri Adrian, la depoul din Ilia al drezinei, pentru participarea la lucrările de implementare a proiectului.
În urma derulării programului de practică pe parcursul celor 5 luni, doctorandul a întocmit un caiet de practică, în care a rezolvat majoritatea punctelor din tematica primită. La finalul stagiului de practică s-a desfăşurat un colocviu în prezenţa cadrului didactic supervizor, a îndrumătorului de practică şi a directorului de proiect, rezultatul obţinut fiind “foarte bine”.
Obiectivele activității au fost realizate integral.
Activitatea 3.6: Transferul către agentul economic a documentaţiei şi rezultatelor finale
În cadrul acestei activități s-a întocmit documentația aferentă sistemului inteligent pentru diagnoza automată a LC din transportul electric feroviar care conține: documentația tehnică (Manualul de utilizare), seturile de măsurători realizate și rezultatul prelucrării măsurătorilor.
Predarea sistemului inteligent proiectat și realizat s-a făcut pe bază de procese verbale de predare primire semnate de către părțile implicate: Coordonator, Agent Economic (S.C. Electrificare C.F.R. S.A. București, Centrul de Electrificare Deva).
Activitatea 3.7: Participare la manifestări tehnico-științifice;
Activitatea de cercetare a fost valorificată prin prezentarea și publicarea următoarelor articole științifice:
- Raluca Rob; Stela Rusu-Anghel; Caius Panoiu – Intelligent System for Tracking and Logging the Zigzag Pantograph Motion, Conference: 2018 Innovations in Intelligent Systems and Applications (INISTA), July 2018, DOI: 10.1109/INISTA.2018.8466302
- Caius Panoiu; Raluca Rob; Stela Rusu-Anghel – Real Time System for Measuring the Pantograph Vertically Position Correlated with Temperature and Air Humidity – 2018 3rd International Conference on Smart and Sustainable Technologies (SpliTech), 26-29 June 2018, Publisher: IEEE
- Stela Rusu-Anghel; Manuela Panoiu; Cristian Abrudean – Intelligent Application for Monitoring the Pantograph-Catenary Contact in Electric Railway Transportation – 2018 3rd International Conference on Smart and Sustainable Technologies (SpliTech), 26-29 June 2018, Publisher: IEEE
CONCLUZII
În cadrul etapei 3 s-au îndeplinit obiectivele stabilite în Planul de realizare a proiectului.
Sistemul de măsură și achiziție a principalilor parametri geometrici ai liniei de contact și a parametrilor auxiliari a fost montat complet pe drezină și testat în condiții industriale, cu rezultate pozitive.
Sistemul expert de analiză a parametrilor măsurați și de diagnoză a liniei de contact a fost testat folosind date reale, deciziile lui fiind confirmate de situația reală din teren.
Sistemul inteligent pentru diagnoza automată a liniei de contact din transportul electric feroviar, împreună cu documentația tehnică, a fost transferat la beneficiar pe bază de proces verbal.
Diseminarea cercetărilor s-a făcut prin prezentarea la 3 Conferințe științifice internaționale.
Considerăm că activitățile proiectului aferente anului 2018 au fost îndeplinite în totalitate.
BIBLIOGRAFIE
[1] MTT-DCF, Instrucția pentru întreținerea tehnică și repararea instalațiilor liniilor de contact ale căii ferate electrificate, Nr.353, Centrul de documentare și publicații tehnice, 1972
[2] Ordinul nr. 2256/2006 privind aprobarea Instrucțiunilor pentru diagnoza căii și liniei de contact efectuată cu automotorul TMC
[3] D. Demian, Ahmed Rachid, I. Gîrniță, C.I. Alic, Stela Rusu-Anghel, C.C. Miklos, Șt. Roșeanu, Contributions to the Development and Improvement of Maintenance Management of Catenary Networks for Railway, PACIFIC 2011 – International Conference on: Pantograph-Catenary Interaction Framework for Intelligent Control, Conference Proceedings, Amiens, France, ISBN 0-7277-3252-8, 2011
[4] Senzor-transmitter de temperatura/umiditate -30~70°C/0~100% RH – documentație tehnică
[5] Wenglor senzor OY1P303P0102 – documentație tehnică
[6] Receptor GPS NL-8022MU Multi GNSS u-blox 8 4.5– documentație tehnică
[7] Camera video IP de exterior IP-ZUM2A-4.0 – documentație tehnică
[8] Placa de achizitie de date NI My-RIO 1900 http://www.ni.com/pdf/manuals/376047a.pdf
[9] Thomas Klinger, Image processing with LabVIEW and IMAQ Vision, Prentice Hall, ISBN 0-13-047415-0, 2003
[10] Rubén Posada-Gómez, Oscar Osvaldo Sandoval-González, Albino Martínez Sibaja, s.a., Digital Image Processing Using LabView, Practical Applications and Solutions Using LabVIEW™ Software, InTech, ISBN 978-953-307-650-8, pag.297-316
[11] Mitsuo A., Precise Measurement and Estimation Method for Overhead Contact Line Unevennes, Electrical Engineering in Japan, Vol.160, nr.2, pp. 77-85, 2007
[12] Rusu-Anghel S., Gârniţă I., Gavrilă I., Pănoiu C., Pănoiu M., Mezinescu S., Advanced System for the Control of Work Regime of Railway Electric drive Equipment, 6th WSEAS International Conference on Energy, Environment, Ecosystems and Sustainable Development (EEESD 10), pp.115-121, ISSN/ISBN 1792/5924/978-960-474-237-0,Timişoara, Romania, 2010